新型电子手套:让机器人拥有触觉!
如今,机器人已成为备受关注的前沿科技领域之一。然而,触觉感知能力,是机器人灵巧地操控各种物体所不可缺少的能力之一。温故而知新,先带大家回顾一下以往介绍过的相关科研案例:
(1)美国康奈尔大学设计的柔性机器人手,采用可伸缩的弹性光波导作为感知弯曲、伸展与力量的传感器,能抓握并感知各种形状与材质的物体。例如,这种假肢手可触摸三个西红柿,感知其柔软度,从而判断其成熟程度。
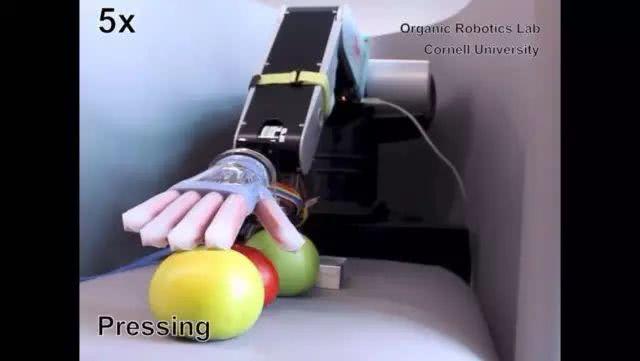
(图片来源: 康奈尔大学)
(2)美国休斯顿大学开发一种人造皮肤,它能让机器手臂能够感知不同的冷热,也可以用于生物医电方面的一系列应用。
(图片来源: 休斯顿大学)
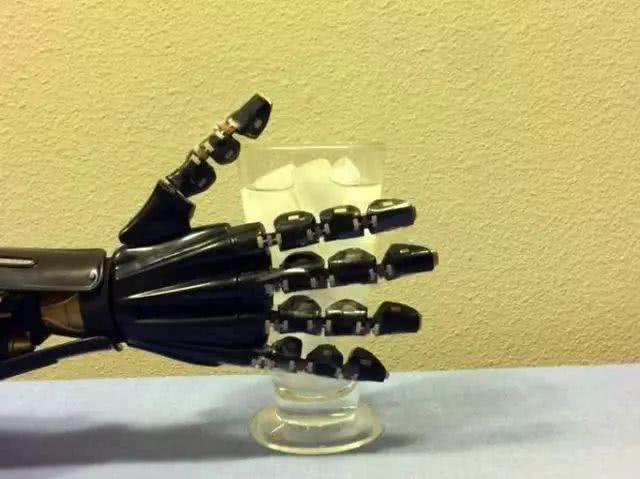
(3)加拿大英属哥伦比亚大学发明了一种低成本的柔性传感器,它能在被拉伸、折叠、弯曲的情况下,检测手指的靠近以及轻触。

(图片来源: 英属哥伦比亚大学)
(4)美国普渡大学开发一种称为“iSoft”的可拉伸柔性传感器。它能进行实时、“多模式”的感知,例如感知持续的接触以及不同方向的拉伸。
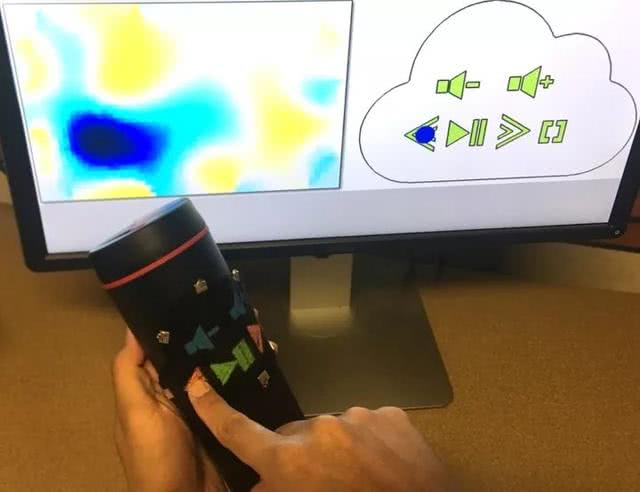
(图片来源:普渡大学)
创新
今天,再为大家介绍有关机器人触觉感知能力的一项新技术。
近日,美国斯坦福大学的工程师们开发出一种含有传感器的电子手套。有朝一日,这些传感器将赋予机器人手更大的灵巧性,而这种灵巧性在人类看来是理所当然的。
在一篇于11月21日发表在《科学机器人学(Science Robotics)》期刊上的论文中,化学工程师 Zhenan Bao 及其团队演示了这种传感器。它工作得很好,足以使机器人手能够触摸娇嫩的浆果,以及握住一个乒乓球,重点是不会压扁它们。
技术
Bao 表示,手套指尖中的传感器同步测量压力的强度与方向,这两个物理量对于实现灵巧的动手能力来说是不可或缺的。研究人员们必须继续完善这项技术,从而自动控制这些传感器。当他们使这项技术变得完美时,穿戴这种手套的机器人将能够在拇指和食指之间灵巧地握住一个鸡蛋,而不会压扁它们或者让它们滑落。
这种电子手套模仿了人类皮肤各层一起工作的方式,这种方式赋予我们的双手非凡的感知能力。
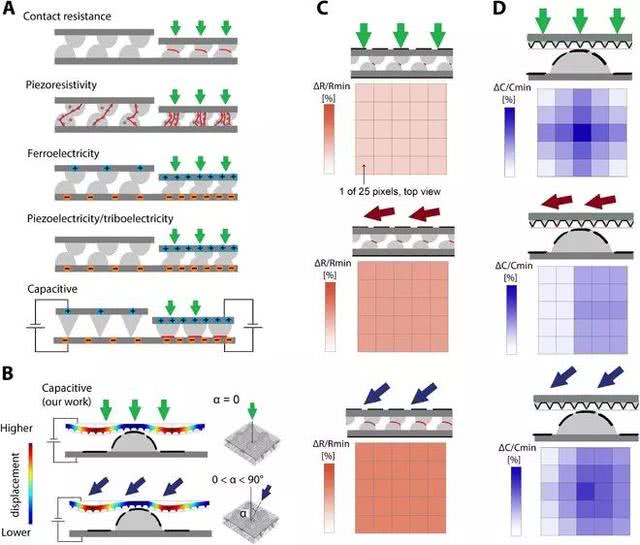
我们皮肤的外层充满可检测压力、热量和其他刺激的传感器。我们手指和手掌含有非常丰富的触摸传感器。这些传感器与皮肤的一个子层,也称为“棘层”,一起工作。棘层的微观“地貌”充满“山丘”和“山谷”,显得崎岖不平。
这种崎岖不平非常重要。当我们的手指触摸物体时,外层的皮肤会靠近棘层。较轻的触摸会被靠近“山顶”的传感器感受到。而更大的压力会迫使外层皮肤陷入棘层的“山谷”中,触发更加强烈的触觉感知。
可是,测量压力的强度只是棘层功能的一部分。这一崎岖不平的子层也有助于揭示压力或剪切力的方向。例如,手指向北压,会在这些微型“山丘”的南坡上制造出强烈的信号。这种感知剪切力的能力,成为了帮助我们在拇指与食指之间温柔而又牢固地握住鸡蛋的关键。
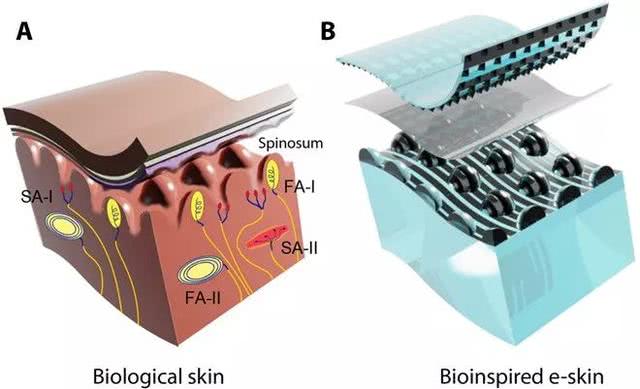
人类皮肤启发的电子皮肤(图片来源:参考资料【2】)
仿生电子皮肤的设计理念(图片来源:参考资料【2】)
博士后访问学者 Clementine Boutry 和硕士生 Marc Negre 领导了这种电子传感器的开发,它正好模仿了人体的这一机制。机器人手套指尖上的每个传感器,都是由三个在一起协力工作的柔性层组成。顶层与底层都是电活性的。研究人员在两个表面的每一面上都放置了电线网络,就像田里的一行一行的庄稼,并且使这些行相互垂直,创造出密集的小型感知像素阵列。他们也让底层像棘层一样崎岖不平。
中间的橡胶绝缘子将顶层与底层的电极简单地分开。然而,这种分隔很关键,因为相互靠近而又不相互触摸的电极能存储电能。机器人手指压下时,顶层的电极被压得靠近地底层,存储的能量相应增加。底层的“山丘”和“山谷”提供了一种将压力的强度与方向映射到垂直网格中的特殊点的方法,这种方法很像人类皮肤。
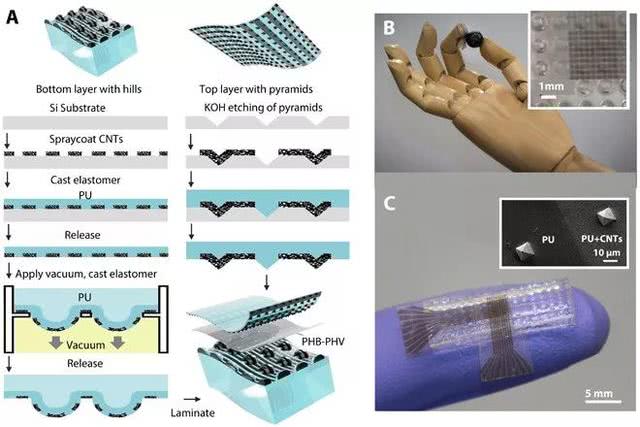
电子皮肤的制造与外观(图片来源:参考资料【2】)
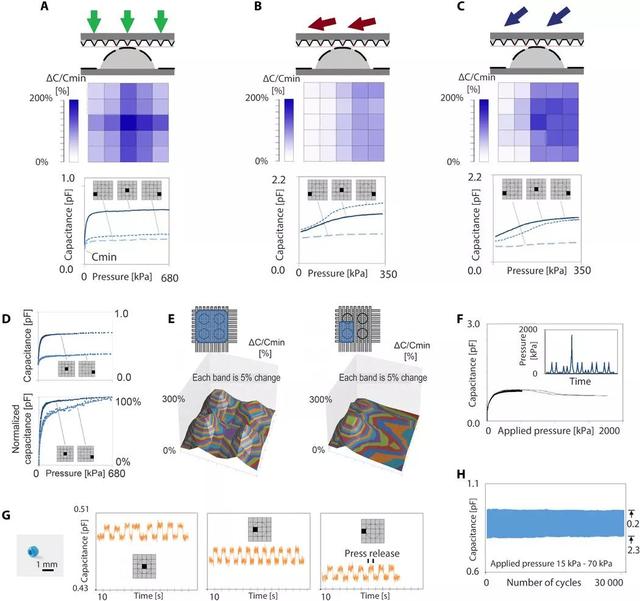
通过连续单像素信号响应获取的仿生电子皮肤的响应特性(图片来源:参考资料【2】)
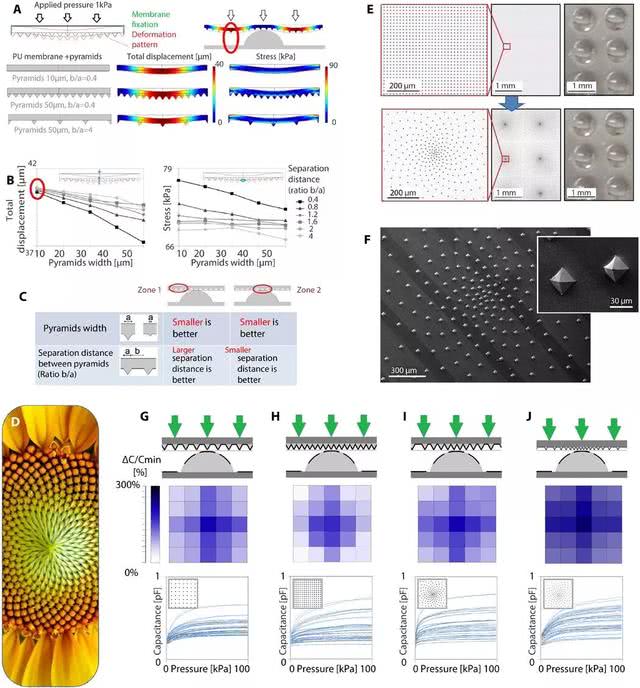
仿生电子皮肤的优化(图片来源:参考资料【2】)
为了测试他们的技术,研究人员们在一个橡胶手套的手指上放置了三层传感器,并将手套戴到机器人手上。最终的目标是将传感器直接嵌入到机器人手上类似皮肤的覆盖物中。在一个实验中,他们对戴着手套的机器人手进行编程,使之温柔地触摸一个浆果,且不会损坏它。他们也对机器人手进行编程,使之拿起并移动一个乒乓球,而不会压坏它。他们是通过采用传感器检测适当的剪切力来抓握住球而不会扔掉它。
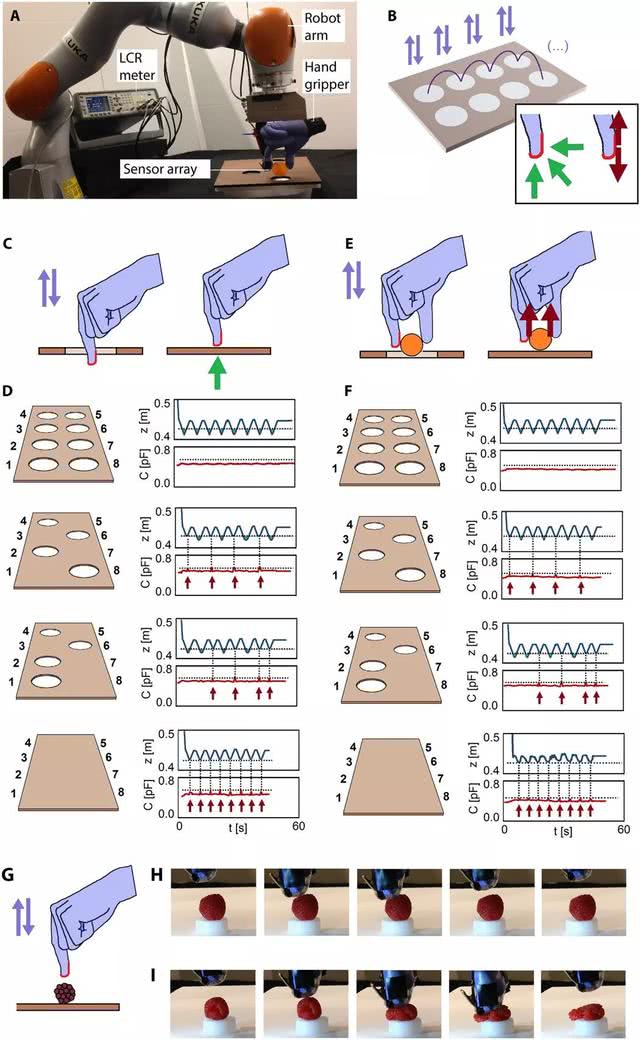
安装在机器人手上的电子皮肤实验(图片来源:参考资料【2】)
价值
Bao 表示:“这项技术使我们踏上一条道路,未来将赋予机器人一种感知功能,而这种感知功能是人类皮肤才有的。”
Bao 表示,通过适当的编程,穿戴现有的触摸传感手套的机器人手能执行重复的任务,例如从传送带上捡起鸡蛋并放到纸盒中。这项技术也可以应用于离不开精准触控的机器人辅助外科手术。但是,Bao 的最终目标是开发手套的高级版本,能自动施加适量的力,安全地握住物体,而无需事先编程。
她说:“我们能编程一个机器手触摸树梅而不会挤坏它。但是,要触摸并检测出它是树莓,并使机器人能捡起它,我们还有很长的路要走。”








